How do we know what we don’t know? ¿Cómo sabemos lo que no sabemos?

This talk is about visualisation to help in clustering high-dimensional data
Avoid cherry picking, look at all

Image: Sketchplanations
High-dimensional visualisation

Tours of high-dimensional data are like examining the shadows (projections)
(and slices/sections to see through a shadow)
High-dimensional visualisation
Data is 2D:
Projection is 1D:
Notice that the values of change between (-1, 1). All possible values being shown during the tour.
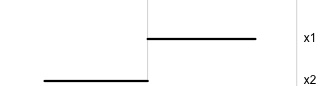
watching the 1D shadows we can see:
- unimodality
- bimodality, there are two clusters.
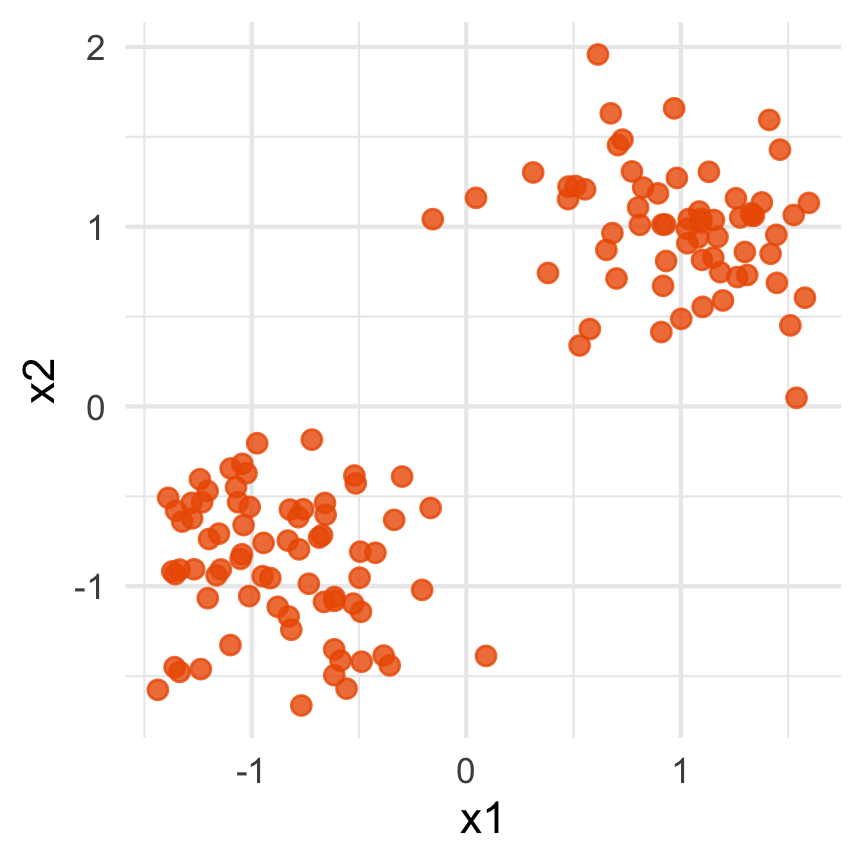
What does the 2D data look like? Can you sketch it?
High-dimensional visualisation
⟵
The 2D data
High-dimensional visualisation
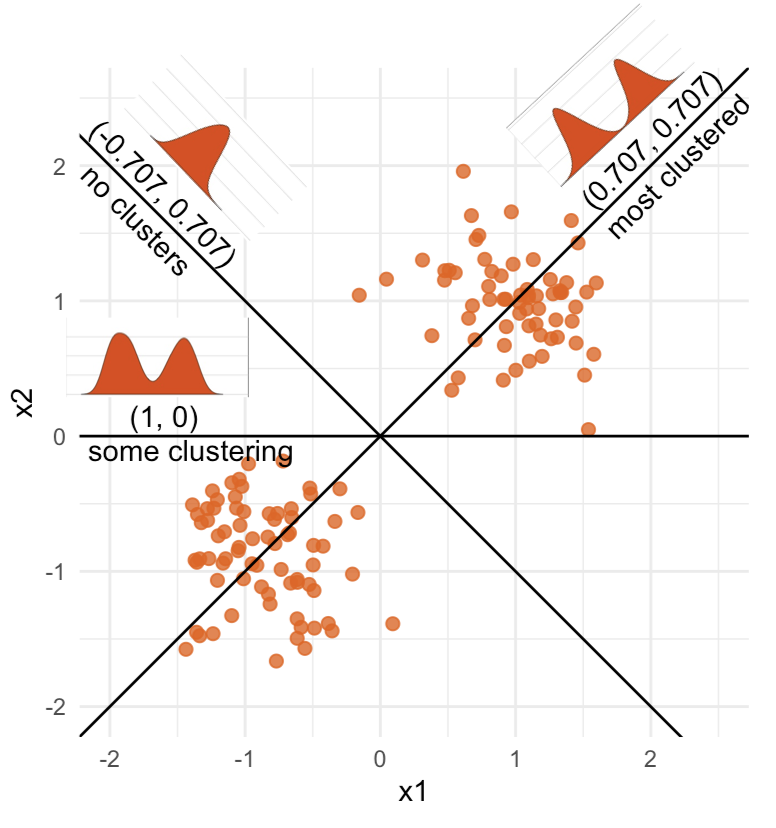
Data is 3D:
Projection is 2D:
Notice that the values of change between (-1, 1). All possible values being shown during the tour.
See:
- circular shapes
- some transparency, reveals middle
- hole in in some projections
- no clustering
High-dimensional visualisation
Data is 4D:
Projection is 2D:
How many clusters do you see?
- three, right?
- one separated, and two very close,
- and they each have an elliptical shape.
- do you also see an outlier or two?
Tour architecture
- Data: -D
- Projection dimension: choose
- Rendering method: histogram, density plot, scatterplot, …
Algorithm:
- Path taken through high-dimensions: random, guided, local, little, manual
- Interpolation method: geodesic (plane to plane), Givens (basis to basis)
Software:
![]()
![]()
![]()
![]()

Types of tours
Grand tour
Slice display
Guided tour
Local tour
Related methods
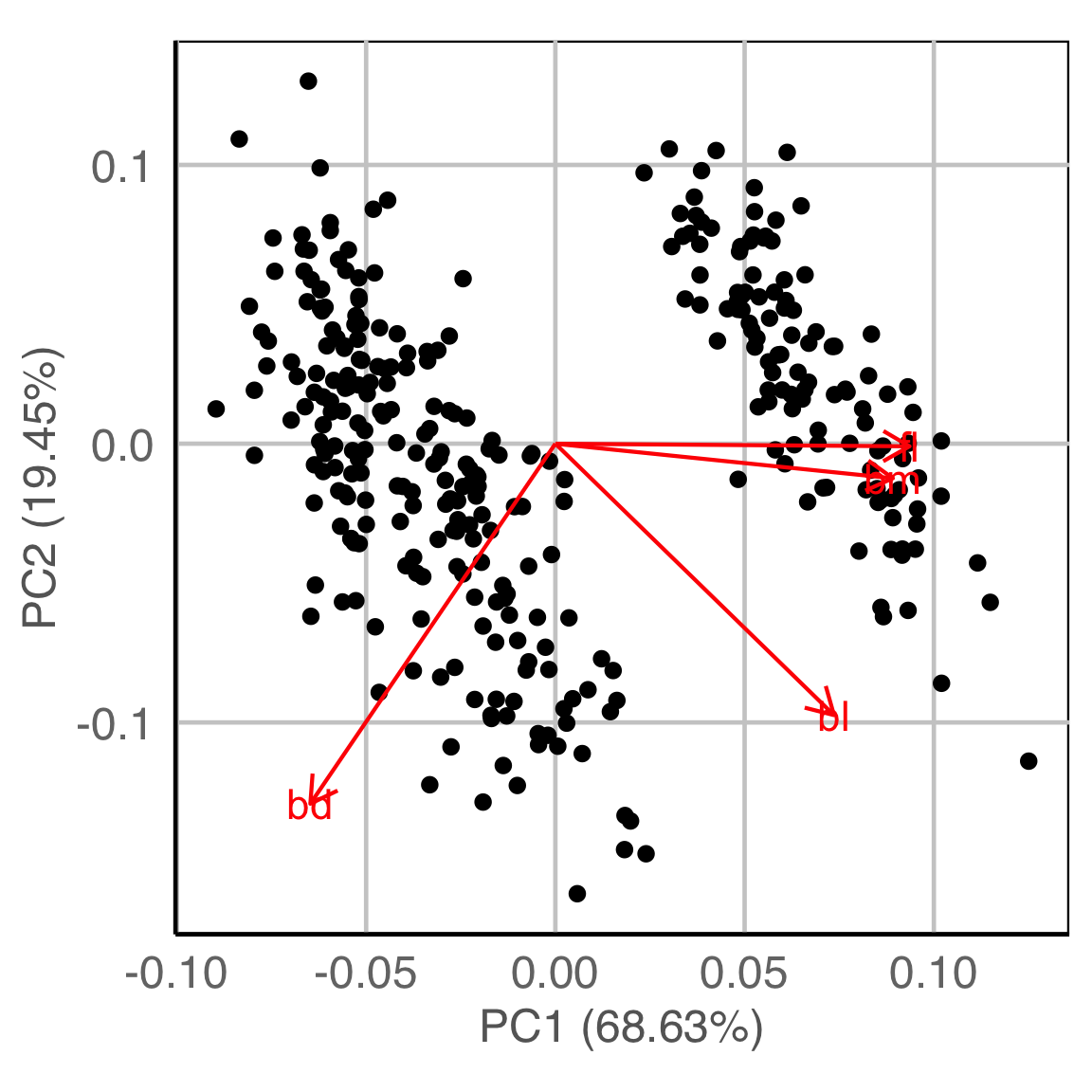
PCA
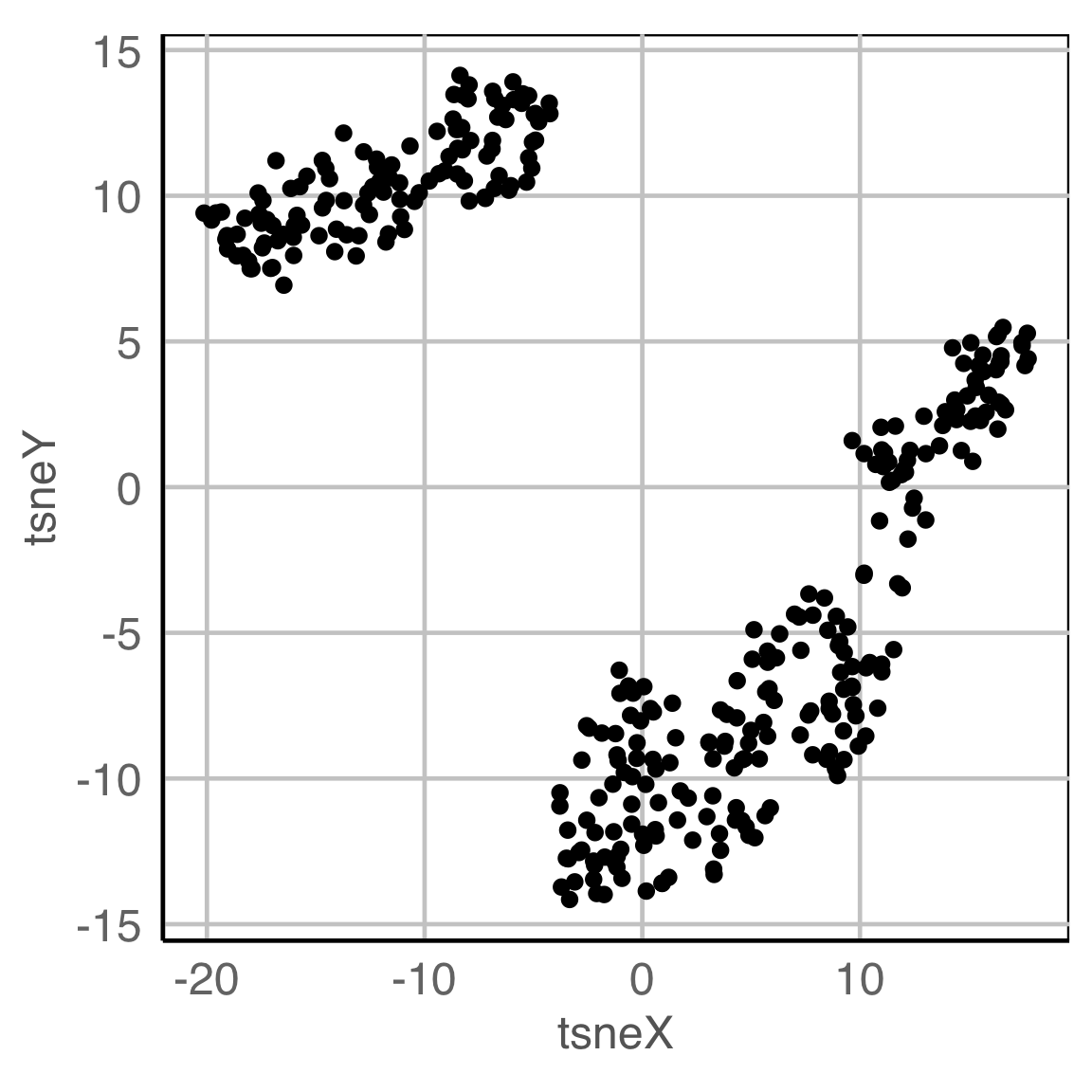
NLDR: tSNE
Model-based - 2D (1/3)
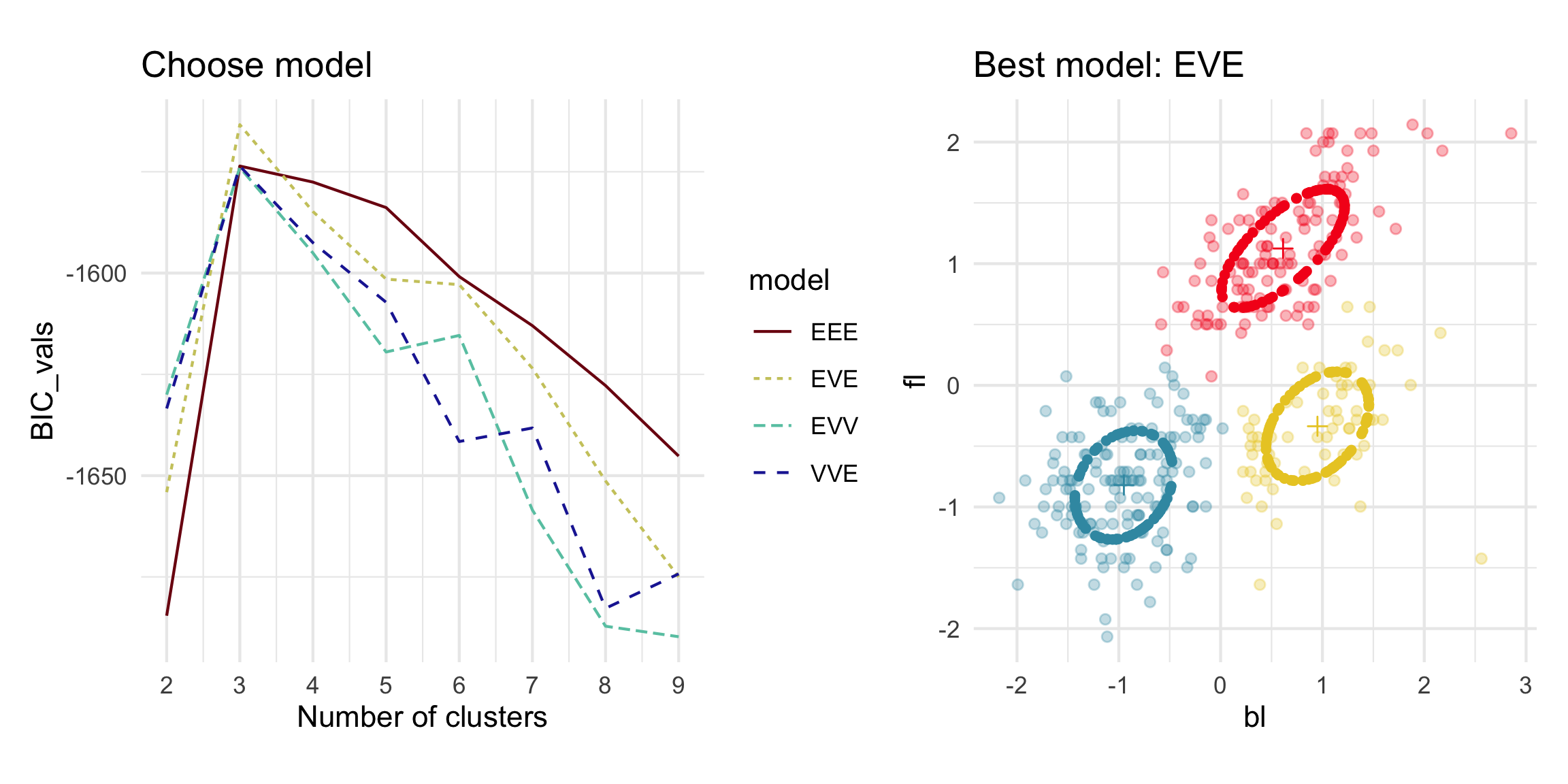
Model-based - 4D (2/3)
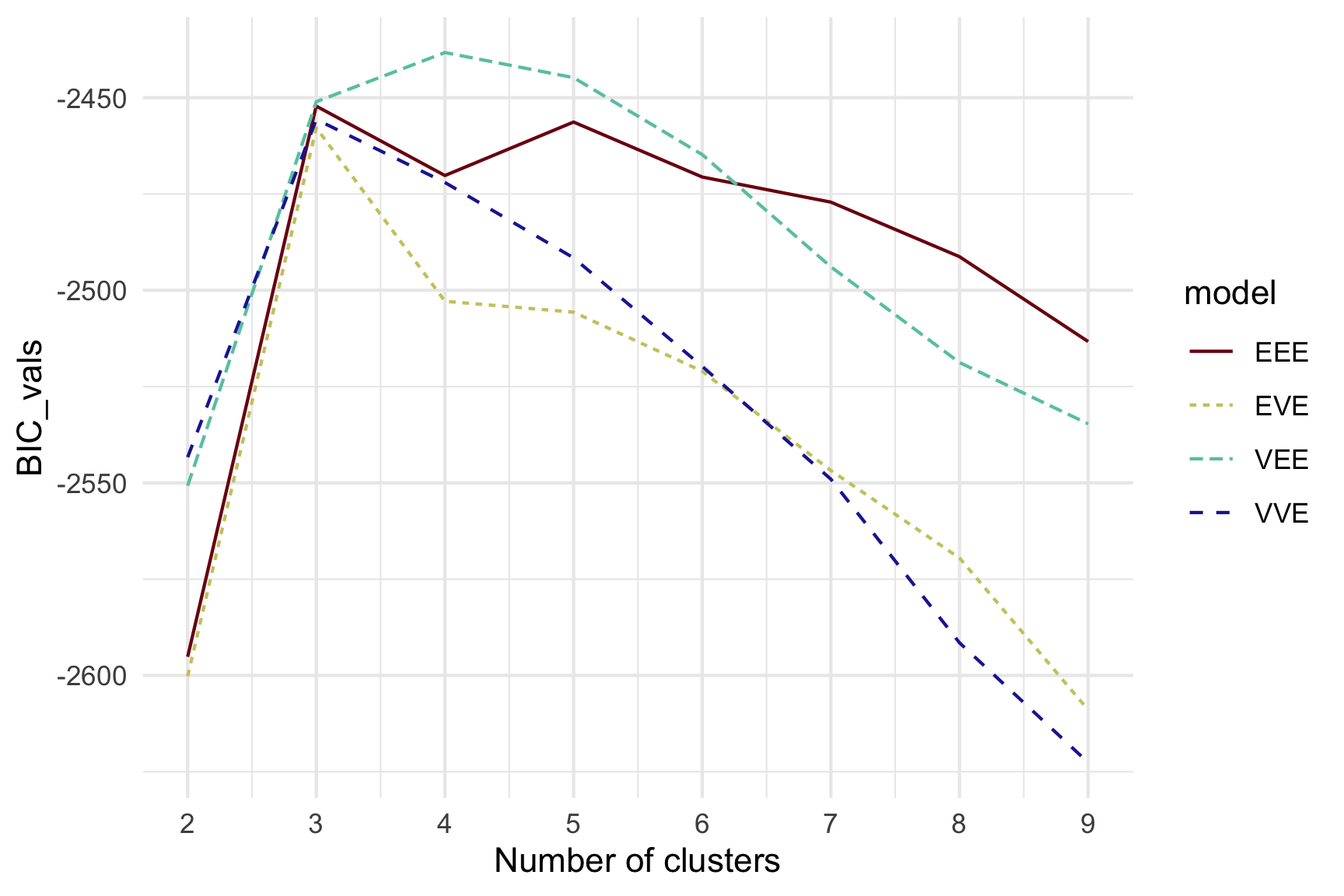
Model-based (3/3) ~~Which fits the data better?
Best model: four-cluster VEE
Three-cluster EEE
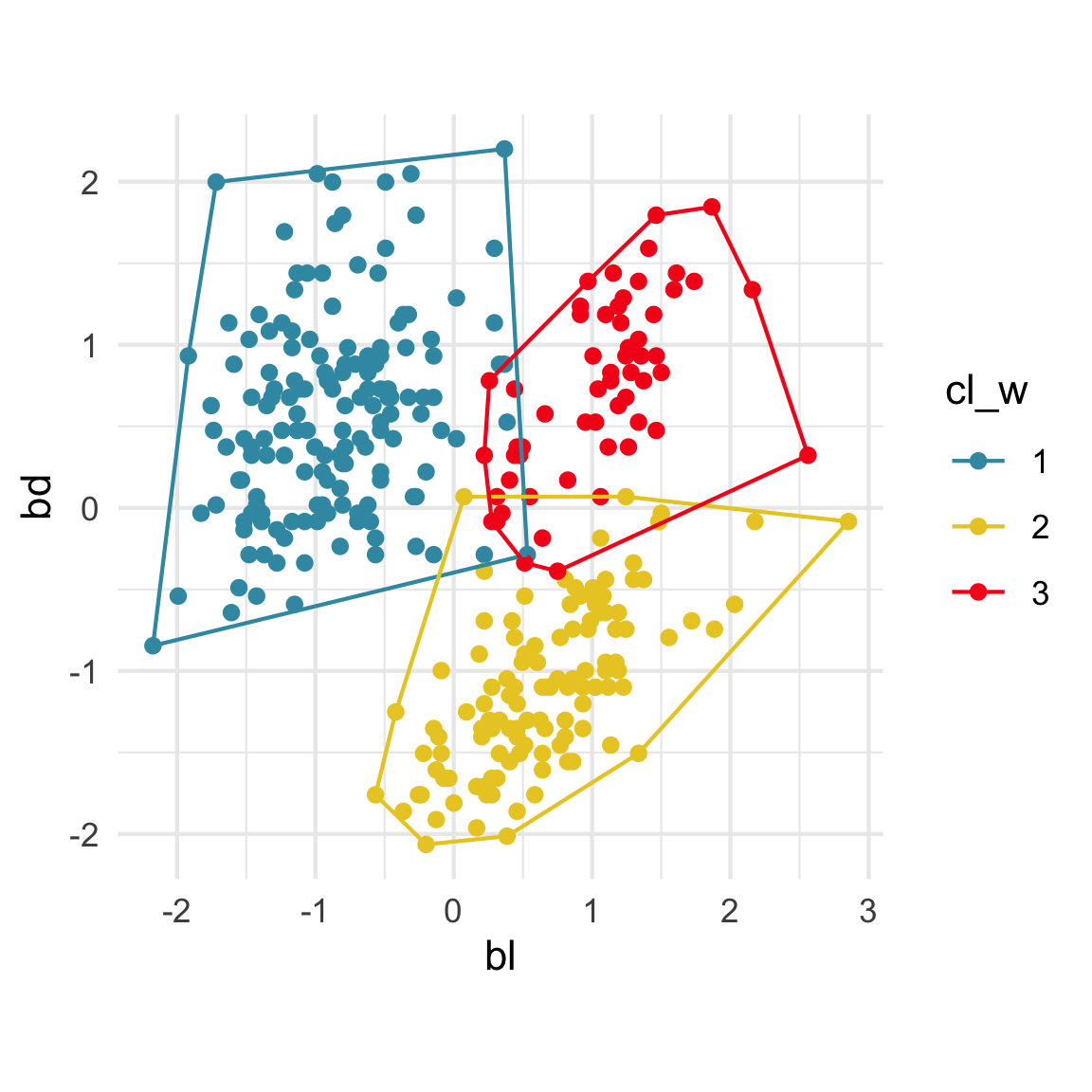
Summarising clusters
Convex hulls are often used to summarise clusters in 2D. It is possible to view these in high-d, too.
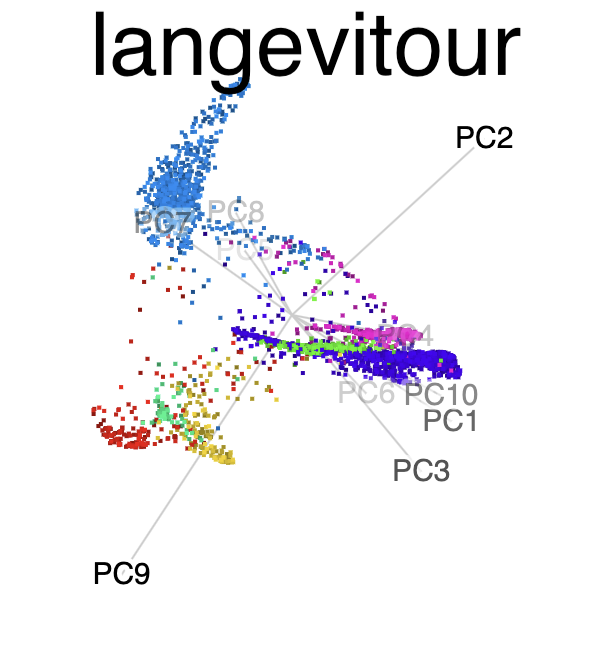
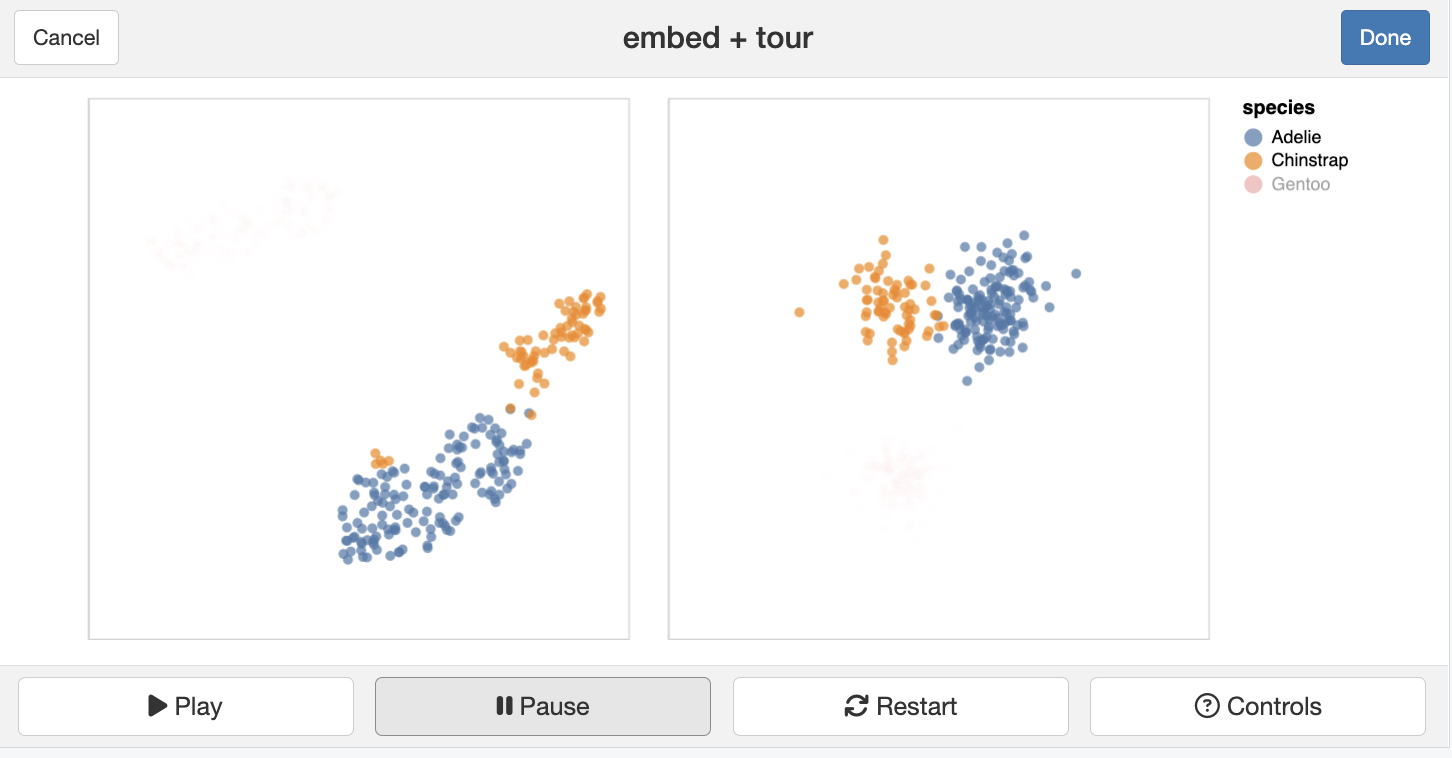
Dimension reduction
limn_tour_link(
p_tsne_df,
penguins_sub,
cols = bl:bm,
color = species
)
References and acknowledgements
- Cook and Laa (2023) Interactively exploring high-dimensional data and models in R
- Slides made in Quarto.
- Get a copy of slides at https://github.com/dicook/LatinR

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.